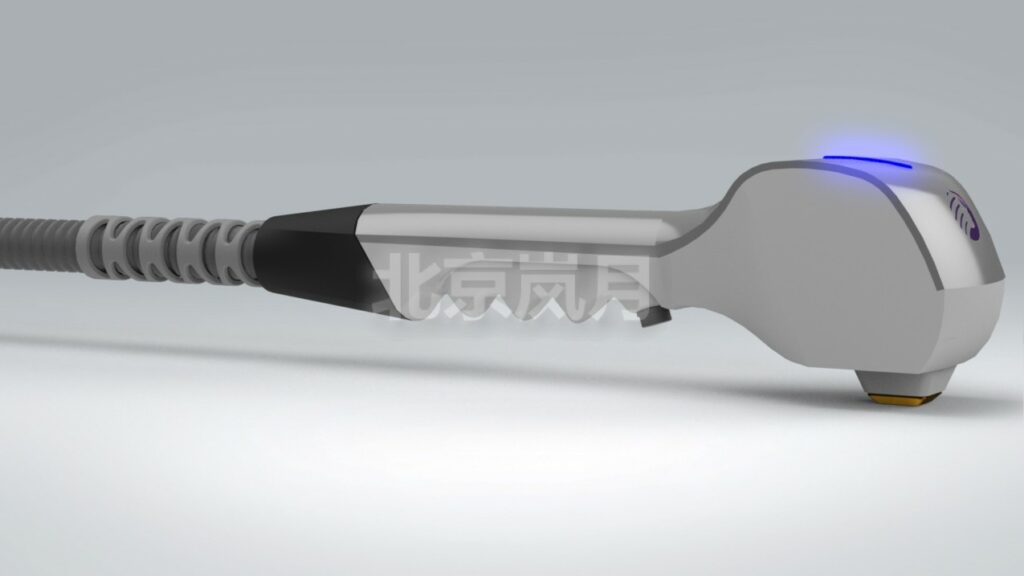
美容仪器中,有激光美容产品,激光减肥,激光祛斑,激光美白等,本手柄出口伊朗、以色列,日本等国家
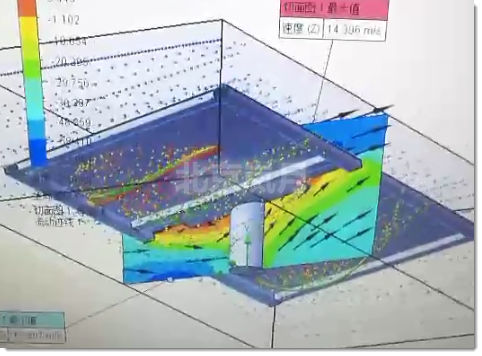
外部流体,风流仿真 流体分内流和外流,示例是个外流仿真,风载荷的示例,内流意思如管道内的水,效果和这个外流差不多,都能看出流动轨迹和涡流,流速、压降,指定面或者指定空间,或者指定点的内容。这不仅仅是个动画,是真实模拟,只要给的参数准确,可以求解出模拟数值,如压降,流速等等。 该风流仿真,经第三方风洞测试,日本建材中央试验所的真实试验结果误差<8%

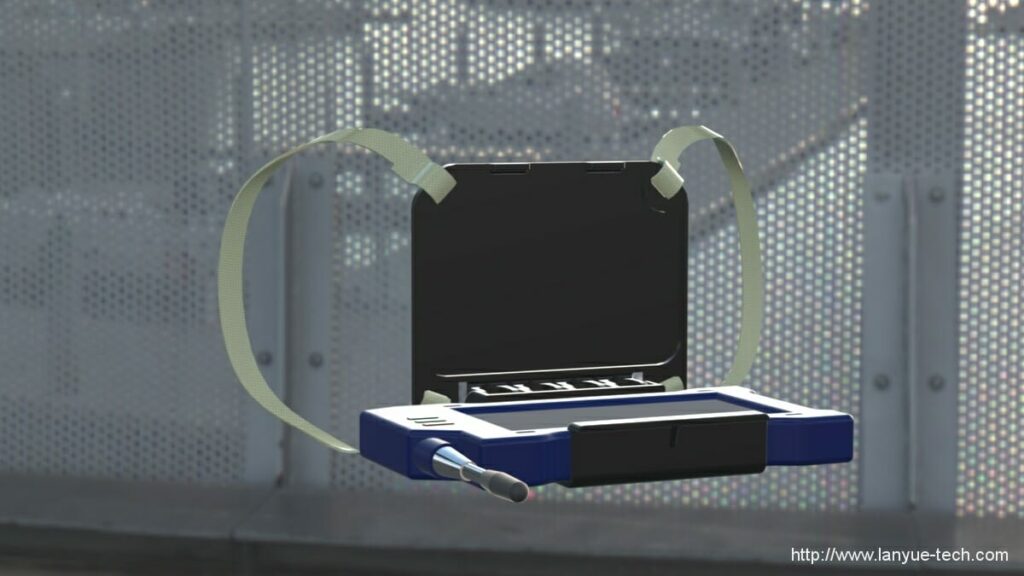
为施工现场、建筑工地的板材,片材进行搬运,提供一个方便的运输工具,大大节省了人力成本。提高了搬运的舒适度,降低了人工消耗,靠材料的自重夹持,对一些如木板,铁板,塑料板等建筑材料,都有着很好的适应性。

是这么个产品,一个螺旋的滑梯,这个滑梯面,大家也看到了,是个半圆柱面,还带有螺旋。 我们最终是要把这个滑梯制作成产品,毋庸置疑,我们需要钣金图,那怎么下料切割呢? 看客们,也来试试,我们这已经交付投产了。